|
Mustafa Shaikh I work with deep learning, computer vision, and robotics. I'm currently working on a multi-object tracking system for animal and cell video data using deep learning. The project is fully open source - check it out at dreem.sleap.ai. I also touch on some multi-view 3D pose estimation. During my master's research, I worked on a trajectory optimization problem in a pursuer-evader scenario. We demonstrated accurate and collision free tracking on a real robot.Previously, I worked in industry for ~5 years in large organizations in a data science role. I worked closely with business stakeholders and led projects end to end. Check out some of my other projects below! |

|
Publications |
|
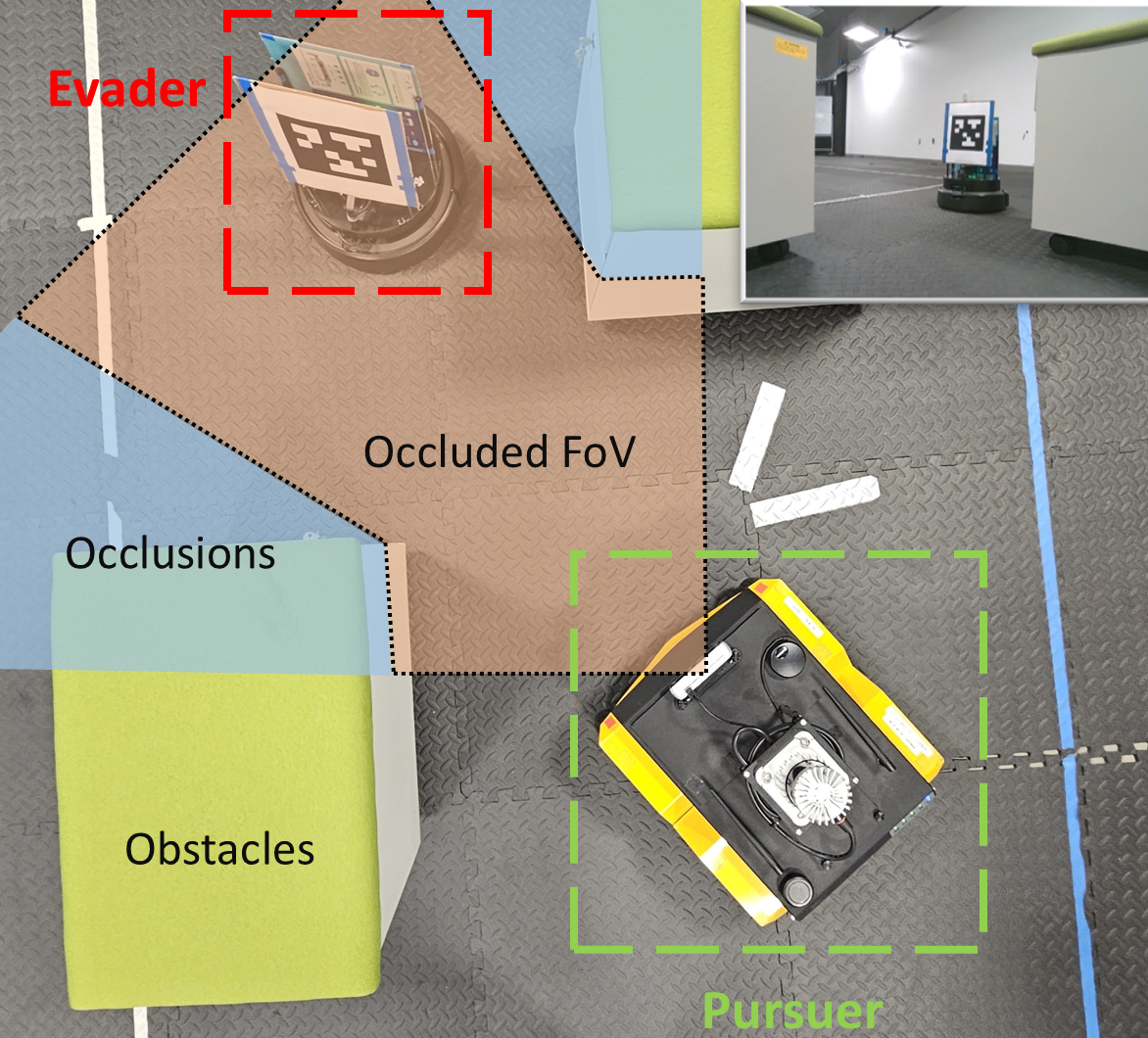
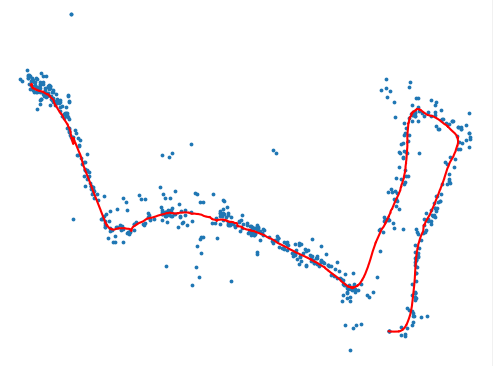
Control Strategies for Pursuit-Evasion Under Occlusion Using Visibility and Safety Barrier Functions
Minnan Zhou*, Mustafa Shaikh*, Vatsalya Chaubey*, Patrick Haggerty, Shumon Koga, Dimitra Panagou, Nikolay Atanasov *Equal contribution IEEE International Conference on Robotics and Automation (ICRA) 2025 project page / paper / arXiv
|
Projects |
|
Autonomous Quadcopter Navigation with Reinforcement Learning
Reinforcement learning approach to safe 3D navigation of a quadcopter. |
|
LLM Workflow - Research Paper Retrieval
An LLM workflow with a finetuned Llama 3.2 1B Instruct that retrieves relevant research papers from Arxiv based on user chat queries. Integrated with Cursor via MCP. |
|
Visual Inertial SLAM
Landmark and trajectory estimation from calibrated stereo camera features and IMU measurements. |

|
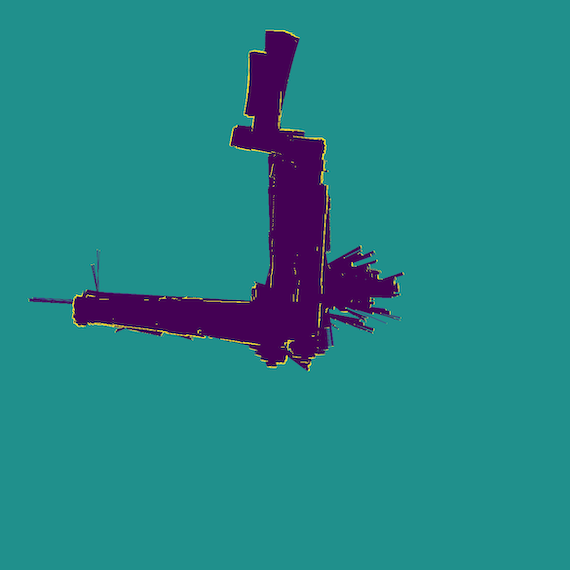
2D Occupancy and Texture Mapping
Particle filter for occupancy and texture mapping using LiDAR, RGBD camera, and IMU data. |
|
(C++) String Library with Buffer Manager
A barebones String library with a buffer manager. |
|
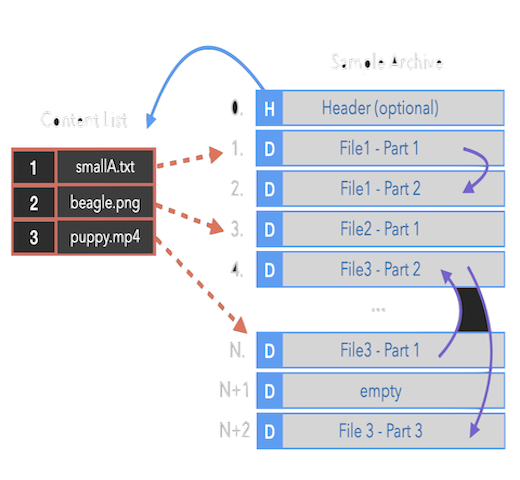
(C++) Archive Tool
A general purpose archive tool with compression, add, remove, and retrieve functionality. |
|
Website template from Jon Barron |