|
Mustafa Shaikh Hi! I'm Mustafa, and I work with deep learning and robotics. I completed my master's in Electrical and Computer Engineering at UC San Diego, and my undergraduate studies in Engineering Science at the University of Toronto. I'm currently working on a multi-object tracking problem for animal and cell video data using deep learning, with the Computational Neuroscience Lab at SALK Institute for Biological Studies. The project, DREEM, is fully open source. During my master's research, I worked on a trajectory optimization problem with a limited field of view in a pursuer-evader scenario. We demonstrated accurate and collision free tracking on a real robot.
Previously, I worked in industry for ~5 years in large organizations in a data science role.
I worked closely with business stakeholders and led projects end to end.
|

|
Publications |
|
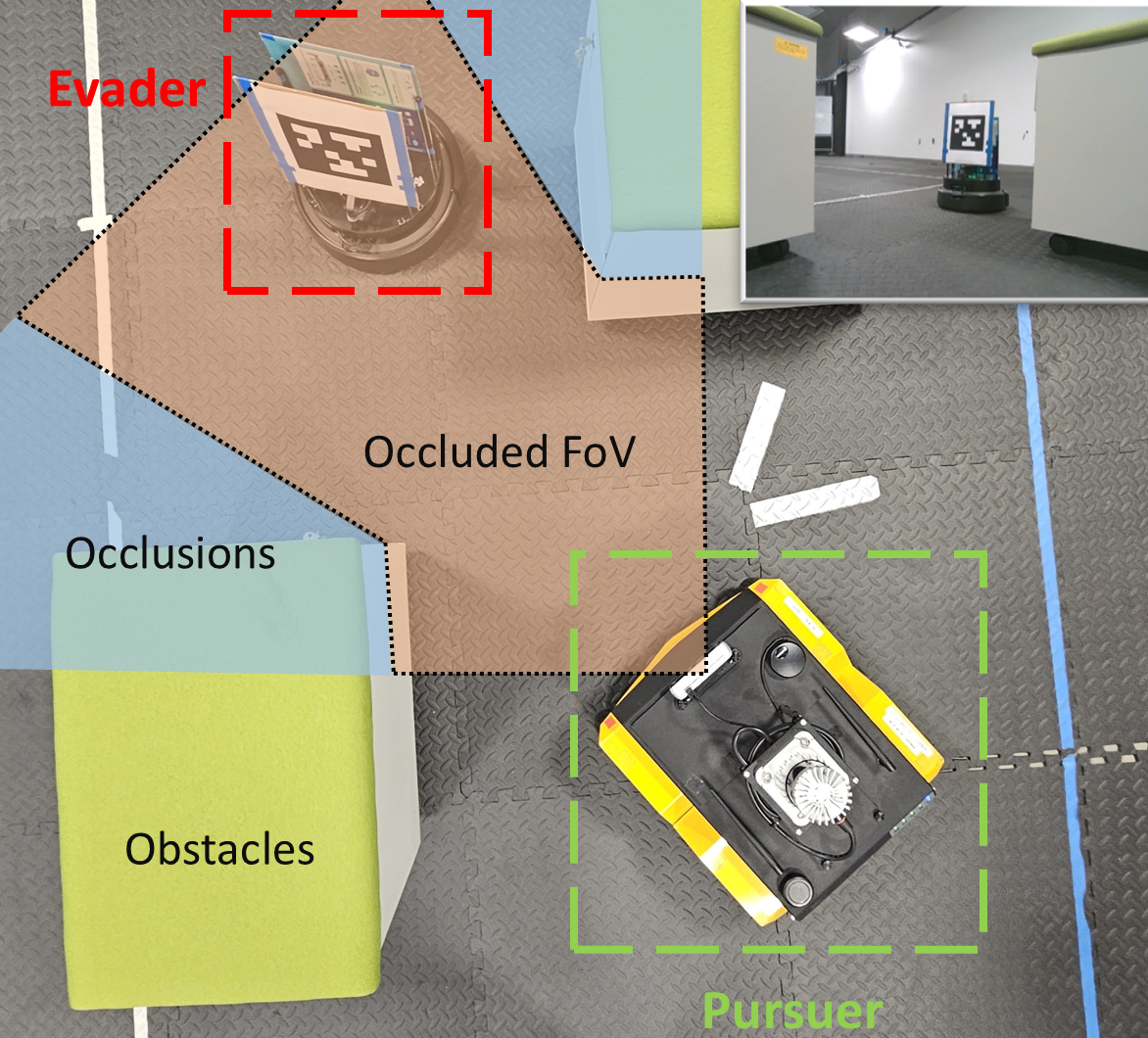
Control Strategies for Pursuit-Evasion Under Occlusion Using Visibility and Safety Barrier Functions
Minnan Zhou*, Mustafa Shaikh*, Vatsalya Chaubey*, Patrick Haggerty, Shumon Koga, Dimitra Panagou, Nikolay Atanasov *Equal contribution Accepted to the IEEE International Conference on Robotics and Automation (ICRA) 2025 project page / arXiv
|
Projects |
|
Visual Inertial SLAM
Landmark and trajectory estimation from calibrated stereo camera features and IMU measurements. |

|
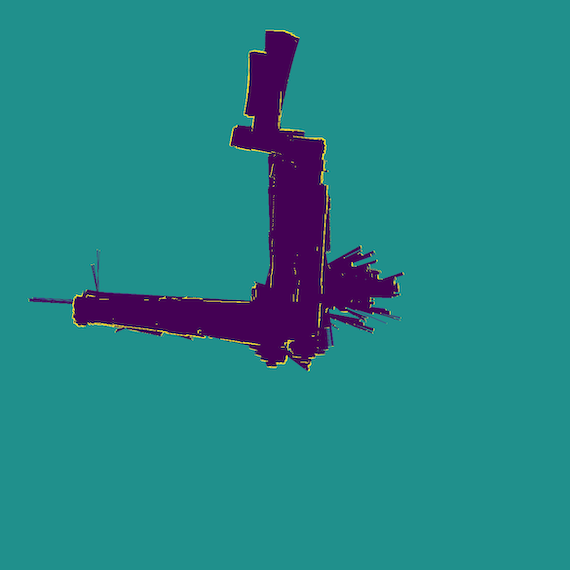
2D Occupancy and Texture Mapping
Particle filter for occupancy and texture mapping using LiDAR, RGBD camera, and IMU data. |
|
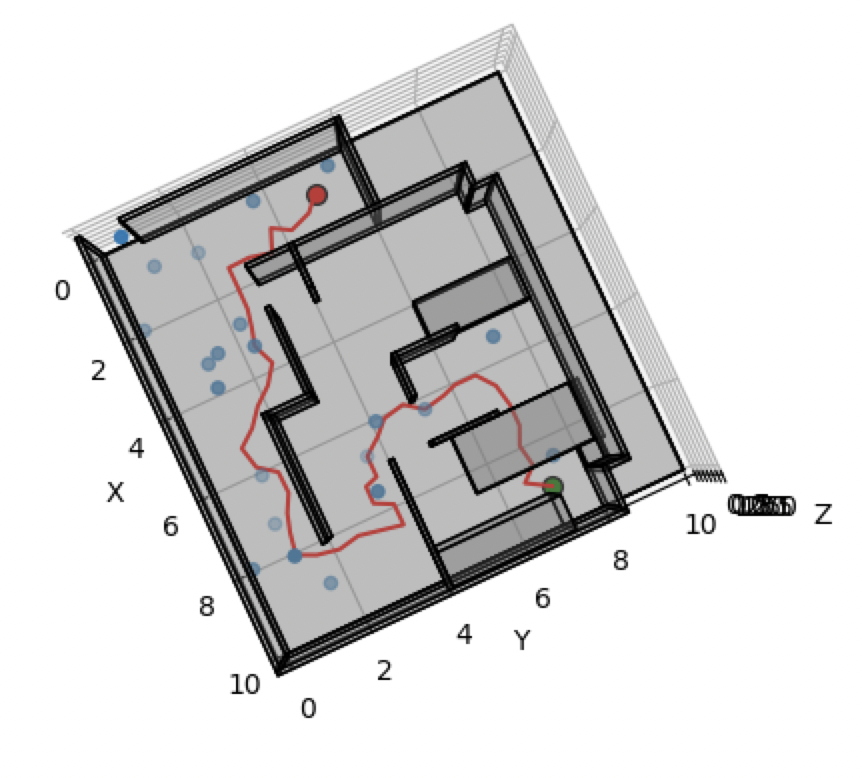
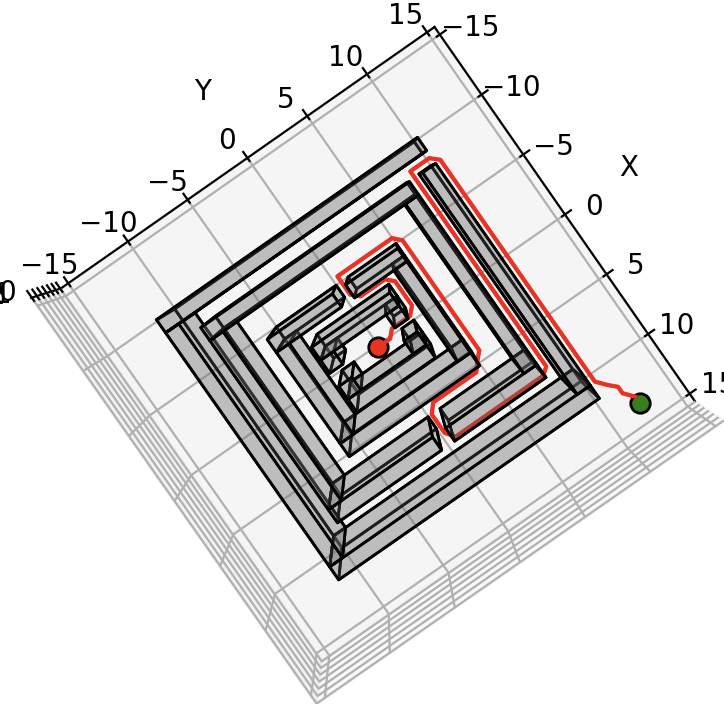
3D Motion Planning
Classical 3D motion planning with obstacles. |
|
(C++) String Library with Buffer Manager
A barebones String library with a buffer manager. |
|
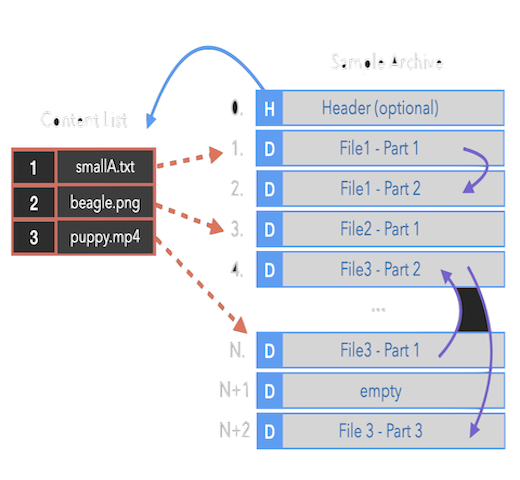
(C++) Archive Tool
A general purpose archive tool with compression, add, remove, and retrieve functionality. |
|
|
(C++) In-memory JSON Database and Query System
An in-memory JSON model with a query language to select, filter, and aggregate data. |
|
Website template from Jon Barron |